Részvény:



3 Lineáris egyenletek rendszerei és megoldása
az lineáris egyenletek ezek egy vagy több ismeretlen ismeretlen polinomiális egyenletek. Ebben az esetben az ismeretlenek nem emeltek hatalomra, és nem szaporodnak egymás között (ebben az esetben azt mondják, hogy az egyenlet 1. fokú vagy első fokú).
Egy egyenlet egy matematikai egyenlőség, ahol egy vagy több ismeretlen elemről van szó, amelyet ismeretlennek vagy ismeretlennek fogunk hívni abban az esetben, ha több mint egy. Ennek az egyenletnek a megoldásához meg kell találni az ismeretlenek értékét.
A lineáris egyenletnek a következő szerkezete van:
hogy0· 1 + a1· X1+ hogy2· X2+... + an· Xn= b
Hol0, hogy1, hogy2,..., an olyan valós számok, amelyek értékét ismerjük, és koefficiensnek nevezik, b egy ismert valós szám, amelyet független kifejezésnek neveznek. És végül X1, X2,..., Xn amelyek ismeretlen néven ismertek. Ezek azok a változók, amelyek értéke ismeretlen.
A lineáris egyenletrendszer egy lineáris egyenletek halmaza, ahol az ismeretlenek értéke minden egyenletben azonos.
Logikusan a lineáris egyenletek rendszerének megoldása az értékek hozzárendelése az ismeretlenekhez, így az egyenlőség igazolható. Ez azt jelenti, hogy az ismeretleneket úgy kell kiszámítani, hogy a rendszer összes egyenlete egyidejűleg teljesüljön. A lineáris egyenletek rendszerét a következőképpen ábrázoljuk
hogy0· 1 + a1· X1 + hogy2· X2 +... + an· Xn = an + 1
b0· 1 + b1· X1 + b2· X2 +... + bn· Xn = bn + 1
c0· 1 + c1· X1 + c2· X2 +... + cn· Xn = cn + 1
... .
d0· 1 + d1· X1 + d2· X2 +... + dn· Xn = dn + 1
ahol a0, hogy1,..., an,b0,b1,..., bn ,c0 ,c1,..., cn stb. a valós számok és a megoldandó ismeretlenek X0,..., Xn ,Xn + 1.
Minden egyes lineáris egyenlet egy vonalat jelent, ezért az N lineáris egyenletek egyenletrendszere N egyenesen húzott térben.
Attól függően, hogy hány ismeretlen az egyes lineáris egyenletek, az egyenletet ábrázoló sor egy másik dimenzióban, azaz egy két ismeretlen egyenletben (például 2 · X) jelenik meg.1 + X2 = 0) egy kétdimenziós térben lévő vonal, egy három ismeretlen egyenlet (például 2 · X)1 + X2 - 5 · X3 = 10) háromdimenziós térben és így tovább.
Az egyenletrendszer megoldása során az X értékei0,..., Xn ,Xn + 1 előfordul, hogy a vonalak közötti vágási pontok.
Az egyenletrendszer megoldásával különböző következtetéseket érhetünk el. A kapott eredménytől függően megkülönböztethetjük a lineáris egyenletek 3 típusát:
1- Határozatlan kompatibilitás
Bár úgy hangzik, mint egy vicc, lehetséges, hogy amikor megpróbáljuk megoldani az egyenletrendszert, akkor a stílus 0 = 0 nyilvánvalóvá válik..
Ez a fajta helyzet akkor fordul elő, ha végtelen megoldások vannak az egyenletrendszerre, és ez akkor következik be, amikor kiderül, hogy egyenletrendszerünkben az egyenletek azonos vonalat képviselnek. Grafikusan láthatjuk:
Mint egyenletrendszerünk:
Ha 2 egyenletet kapunk 2 ismeretlenével, akkor a két vonalat egy kétdimenziós síkon ábrázolhatjuk
Ahogy ugyanazokat a sorokat láthatjuk, ezért az első egyenlet minden pontja egybeesik a második egyenlet pontjaival, ezért annyi pontot vág, mint a pont, ahol a vonalnak van, azaz végtelensége.
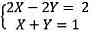
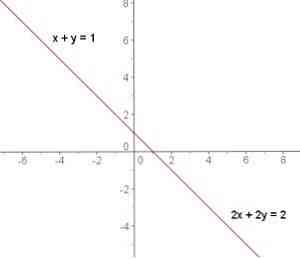
2- Nem összeférhető
A név elolvasásakor elképzelhetjük, hogy a következő egyenletrendszerünk nem lesz megoldás.
Ha megpróbáljuk megoldani például az egyenletrendszert
Grafikusan:
Ha a második egyenlet összes feltételét megszorozzuk, akkor azt kapjuk, hogy X + Y = 1 egyenlő 2 · X + 2 · Y = 2. És ha ezt az utolsó kifejezést levonjuk az első egyenletből, akkor megkapjuk
2 · X-2 · X + 2 · Y -2 · Y = 3-2
Vagy mi ugyanaz
0 = 1
Ha ebben a helyzetben vagyunk, azt jelenti, hogy az egyenletek rendszerében ábrázolt vonalak párhuzamosak, ami azt jelenti, hogy definíció szerint soha nem vágnak, és nincs vágási pont. Amikor egy rendszert ilyen módon mutatnak be, azt mondják, hogy független.
3- Határozott támogatás
Végül megérkezünk arra az esetre, amikor egyenletrendszerünk egyetlen megoldással rendelkezik, abban az esetben, amikor olyan vonalak vannak, amelyek metszéspontja és metszéspontja. Lássunk egy példát:
Ennek megoldásához hozzáadhatjuk a két egyenletet, hogy megkapjuk
(3 · X-4 · Y) + (2 · X + 4 · Y) = -6 + 16
Ha egyszerûsítjük, elmentünk
5 · X + 0 · Y = 5 · X = 10
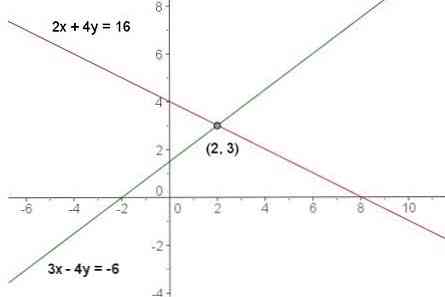
Ebből könnyen megállapíthatjuk, hogy X = 2 és az eredeti egyenletek bármelyikében X = 2, vagyis Y = 3.
Vizuálisan:
A lineáris egyenletek rendszereinek megoldása
Ahogyan az előző részben is láttuk, a 2 ismeretlen és 2 egyenletű rendszerek esetében, egyszerű műveletek, például a hozzáadás, kivonás, szorzás, szétválasztás és helyettesítés alapján, néhány perc alatt megoldhatjuk azokat. De ha megpróbáljuk ezt a módszertant több egyenletű és ismeretlenebb rendszerekre alkalmazni, a számítások unalmasak és könnyen hibáztathatók.
A számítások egyszerűsítése érdekében számos megoldási módszer létezik, de kétségtelenül a legelterjedtebb módszerek a Cramer szabálya és Gauss-Jordan megszüntetése..
Cramer módszer
Annak érdekében, hogy megmagyarázzuk, hogyan alkalmazzák ezt a módszert, elengedhetetlen, hogy tudjuk, mi a mátrixa és tudja, hogyan találja meg a meghatározóját, tegyünk zárójelet a két fogalom meghatározásához.
egy mátrix ez nem más, mint egy vízszintes és függőleges vonalakban elhelyezett és téglalap alakú elrendezésű számok vagy algebrai szimbólumok. Témánkhoz a mátrixot az egyenletrendszer kifejezése egyszerűbb módjaként fogjuk használni.
Lássunk egy példát:
A lineáris egyenletek rendszere lesz
Ez az egyszerű összegző egyenletrendszer két 2 × 2 mátrix működését eredményezi, amely 2 × 1 mátrixot eredményez.
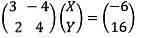
Az első mátrix minden együtthatónak felel meg, a második mátrix az ismeretlen, amit meg kell oldani, és az egyenlőség után elhelyezkedő mátrix azonosítható az egyenletek független feltételeivel.
az döntő olyan művelet, amelyet egy mátrixra alkalmazunk, amelynek eredménye egy valós szám.
Az előző példánkban talált mátrix esetében annak meghatározója:

Miután meghatároztuk a mátrix és a determináns fogalmát, megmagyarázhatjuk, hogy a Cramer-módszer áll.
Ezzel a módszerrel könnyen megoldhatjuk a lineáris egyenletek rendszerét, amennyiben a rendszer nem haladja meg a három ismeretlen három egyenletet, mivel a mátrix determinánsainak kiszámítása nagyon nehéz a 4 × 4 vagy annál nagyobb mátrixok esetében. Ha több mint három lineáris egyenletű rendszer van, akkor a Gauss-Jordan eltávolításával ajánlott a módszer.
Folytatva az előző példát, Cramer segítségével egyszerűen két determinánst kell kiszámítanunk, és ezzel együtt meg fogjuk találni két ismeretlen értékünket..
Rendszerünk:
És van egy mátrix által képviselt rendszer:
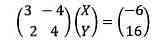
Az X értéke:
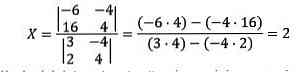
Egyszerűen a divízió nevezőjében található determináns kiszámításakor az első önkormányzatot helyettesítettük a független kifejezések mátrixára. És a divízió nevezőjében van az eredeti mátrixunk meghatározója.
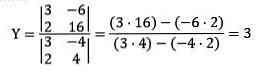
Ugyanezek a számítások az Y beszerzéséhez:
Gauss-Jordan megszüntetése
Meghatározzuk kiterjesztett mátrix a mátrixhoz, amely egy egyenletrendszerből származik, ahol a mátrix végén lévő független kifejezéseket adjuk hozzá.
A Gauss-Jordan kiküszöbölésével végzett módszer a mátrix sorai közötti műveletek révén a kiterjesztett mátrixunkat sokkal egyszerűbb mátrixsá alakítja át, ahol nulla van minden mezőben, kivéve az átlóban, ahol néhányat be kell szereznem. Az alábbiak szerint:

Ahol X és Y valós számok, amelyek megfelelnek az ismeretleneknek.
Megoldjuk ezt a rendszert Gauss-Jordan kiküszöbölésével:



A mátrix bal alsó részén már sikerült nullát szereznünk, a következő lépés az, hogy 0-at kapjunk a jobb felső részén..


0-at értünk el a mátrix bal felső sarkában, most már csak át kell alakítanunk az átlót azokra, és már megoldottuk a rendszerünket Gauss-Jordan.
Ezért arra a következtetésre jutunk, hogy:

referenciák
- vitutor.com.
- algebra.us.es.
- Lineáris egyenletek rendszerei (dátum nélkül). Az uco.es-ből visszanyert.
- Lineáris egyenletek rendszerei. 7. fejezet (nem bevált). Szerkesztve: sauce.pntic.mec.es.
- Lineáris algebrák és geometria (2010/2011). Lineáris egyenletek rendszerei. 1. fejezet Algebra Tanszék. Sevillai Egyetem. Spanyolországban. Az algebra.us.es.